Relative Epipolar Motion of Tracked Features
for
Correspondence in Binocular Stereo
Hao Du, Danping Zou and Yan Qiu Chen
International Conference on Computer Vision (ICCV'2007)
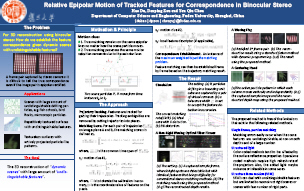
The Problem
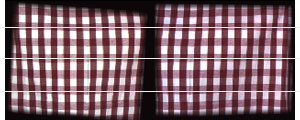
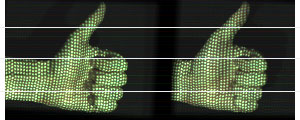
For binocular stereo, how do we establish the feature correspondence given dynamic scenes with indistinguishable features?
Abstact
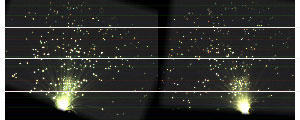
Most 3D reconstruction solutions focus on surfaces, and there has not been much research attention paid to the problem of reconstructing 3D scenes made up of large numbers of particles, while the ability to reconstruct such dynamic scenes is potentially very useful in many areas such as colony behavior research and visual modeling.
This paper proposes an approach - Relative Epipolar Motion (REM) - towards solving the correspondence problem in stereopsis by utilizing the motion clue. It matches feature trajectories instead of the features themselves as used by existing methods. The proposed method has the following new capabilities: (1) It supports reconstructing dynamic 3D scenes of large number of undistinguishable drifting particles; (2) It is applicable to
correspondence establishment for dynamic surfaces made up of repetitive textures; (3) It offers an alternative way to project structured light in active mode for deforming surface reconstruction. Experiment results on both simulated and real-world scenes demonstrate its effectiveness.
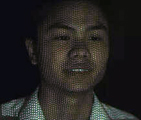
A Video Result
The particle-like structured light for the 3D reconstruction of an expressional human-face.
Poster @ ICCV07
Paper & Citation
Hao Du, Danping Zou and Yan Qiu Chen. Relative Epipolar Motion of Tracked Features for Correspondence in Binocular Stereo. In Proceedings of IEEE International Conference on Computer Vision (ICCV), 2007 [PDF] [Poster]
@inproceedings{Du2007,
Author = {Du, H. and Zou, D. and Chen, Y. Q.},
Title = {Relative Epipolar Motion of Tracked Features for Correspondence in Binocular Stereo},
BookTitle = {Proceedings of IEEE International Conference on Computer Vision (ICCV)},
Year = {2007} }
[Go to my Homepage]
Page last updated:
December 20, 2007 5:01 PM