Learning Composable Behavior Embeddings for Long-horizon Visual Navigation
[code]
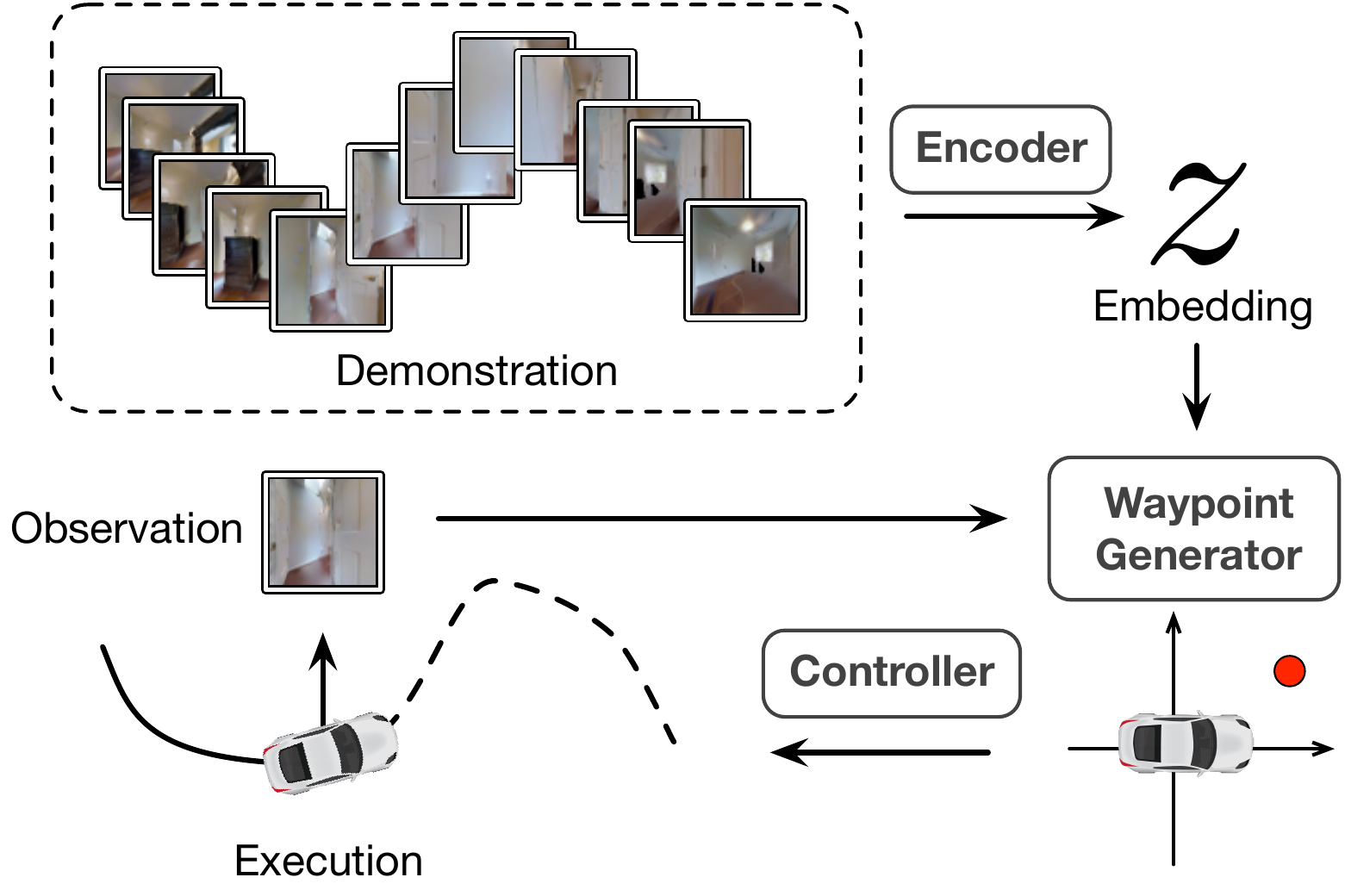
Learning high-level navigation behaviors has important implications: it enables robots to build compact visual memory for repeating demonstrations and to build sparse topological maps for planning in novel environments. Existing approaches only learn discrete, short-horizon behaviors. These standalone behaviors usually assume a discrete action space with simple robot dynamics, thus they cannot capture the intricacy and complexity of real-world trajectories. To this end, we propose Composable Behavior Embedding (CBE), a continuous behavior representation for long-horizon visual navigation. CBE is learned in an end-to-end fashion; it effectively captures path geometry and is robust to unseen obstacles. We show that CBE can be used to performing memory-efficient path following and topological mapping, saving more than an order of magnitude of memory than behavior-less approaches.