Neural Autonomous Navigation with Riemannian Motion Policy
[code]
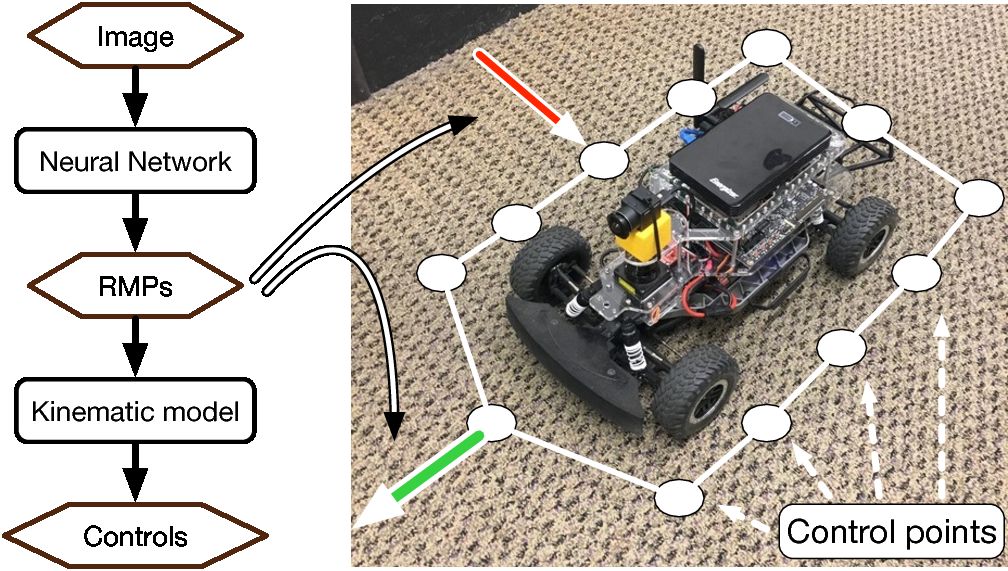
End-to-end learning for autonomous navigation has received substantial attention recently as a promising method for reducing modeling error. However, its data complexity, especially around generalization to unseen environments, is high. We introduce a novel image-based autonomous navigation technique that leverages in policy structure using the Riemannian Motion Policy (RMP) framework for deep learning of vehicular control. We design a deep neural network to predict control point RMPs of the vehicle from visual images, from which the optimal control commands can be computed analytically. We show that our network trained in the Gibson environment can be used for indoor obstacle avoidance and navigation on a real RC car, and our RMP representation generalizes better to unseen environments than predicting local geometry or predicting control commands directly.