| ||||||
|
|
|
|
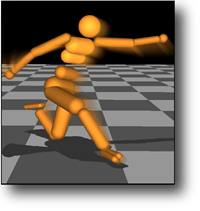
MODELING AND SIMULATION OF MULTI-JOINT DYNAMICS WITH CONTACT
MODEL-PREDICTIVE CONTROL WITH FULL DYNAMICS CONTACT-INVARIANT TRAJECTORY OPTIMIZATION
STATE ESTIMATION AND SYSTEM IDENITIFCATION
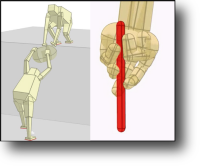
DESIGN OF ROBOTIC HANDS
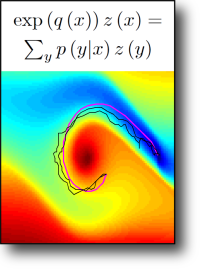
LINEARLY-SOLVABLE OPTIMAL CONTROL
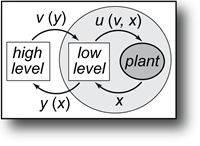
HIERARCHICAL FEEDBACK CONTROL
OPTIMALITY IN SENSORIMOTOR CONTROL
| ||||||||||||||
Copyright © 2010-2013 Emo Todorov | ||||||||||||||