Barrier-Certified Adaptive Reinforcement Learning
with Applications to Brushbot Navigation
We designed a general algorithmic framework that guarantees Lyapunov stability of the safe set of augmented states (states + model parameters) under nonstationary dynamics.
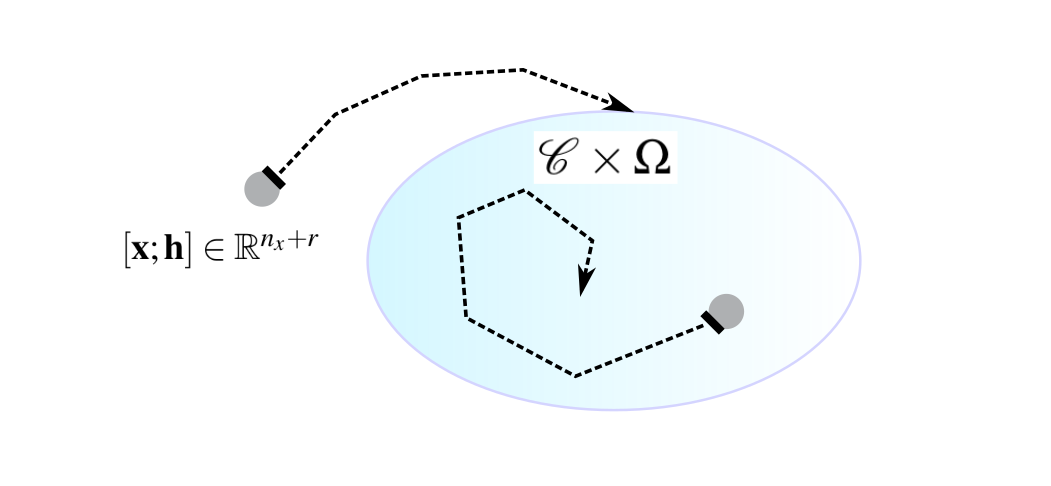
Also, we combined this learning framework with adaptive reinforcement learning algorithms. In this framework, one does not have to reset learning when a policy or dynamics changes.
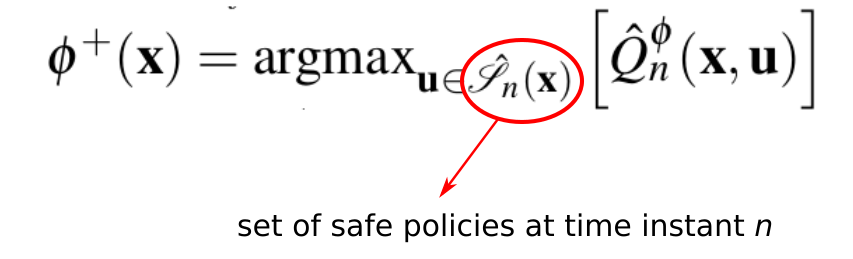
We then proposed a barrier-certified policy update.
Our algorithm was tested on the Robotarium, Georgia Institute of Technology